Una mini-serie a cura di Marco Trombetti, in cui si esploreranno la tumultuosa storia e le incredibili vette raggiunte dalla matematica delle simmetrie: la teoria dei gruppi. In questo secondo episodio, ci addentreremo più nel dettaglio nella definizione di gruppo e nel profondo legame tra gruppi e simmetrie.
.
Cos’è una simmetria?
Nella sua forma più elementare (e vaga), una simmetria è una funzione che lascia globalmente inalterato un ente matematico. Così, se ad esempio consideriamo il seguente triangolo equilatero
una sua simmetria è una isometria, cioè una funzione biettiva del triangolo in sé che conserva le distanze. Non è eccessivamente difficile provare che in questo senso le uniche simmetrie del triangolo equilatero in figura siano le seguenti (notate ad esempio che la rotazione in senso antiorario di 120° coincide con la rotazione in senso orario di 240°)
Possiamo osservare alcune proprietà di questa famiglia di simmetrie. La più ovvia è che componendo due di queste simmetrie si ottiene ancora unadelle sei simmetrie soprammenzionate: ad esempio, eseguendo prima la rotazione di 120° e poi la seconda riflessione dall’alto, si ottiene la terza riflessione dall’alto. Inoltre, ogni simmetria \(\tau\) può essere ‘‘disfatta’’, nel senso che esiste sempre una simmetria opposta che eseguita in successione con \(\tau\) riporta tutti i punti nel loro stato originario (in poche parole, la composta è la rotazione di 360°, l’identità). Ad esempio, l’inversa della rotazione di 120° è la rotazione di 240°, perché eseguendole in successione restituiscono la rotazione di 360°. Esiste sempre un elemento neutro, cioè una simmetria che non dà contributo quando viene eseguita in successione con qualunque altra. In questo caso, l’elemento neutro è la rotazione di 360° perché vuol dire semplicemente: ‘‘tieni ferma la figura’’.
Infine, mentre l’ordine con cui eseguo le simmetrie può essere rilevante (infatti eseguire prima la rotazione di 120° e poi la seconda riflessione restituisce un risultato diverso dall’eseguire prima la seconda riflessione e poi la rotazione di 120°), il modo in cui associo le simmetrie non è rilevante. Cioè vuol dire che se eseguo ad esempio \(6\) simmetrie \(\alpha_1\alpha_2\alpha_3\alpha_4\alpha_5\alpha_6\) in successione, non ha importanza se alcune di queste in sequenza (ad esempio, \(\alpha_3\alpha_4\alpha_5\)) le ‘‘associo’’ prima in un’unica simmetria (diciamo \(\beta\)) e poi computo \(\alpha_1\alpha_2\beta\alpha_6\) in successione.
Cos’è un gruppo astratto?
I tre (in realtà quattro) assiomi evidenziati nella sezione precedente sono quelli che restituiscono la definizione moderna di gruppo (astratto). Un insieme \(G\) di elementi di qualsiasi tipo (ad esempio, le simmetrie di un triangolo equilatero) dotato di un operazione binaria \(\top\), cioè di un modo di associare ad ogni coppia \(x,y\) di elementi di \(G\) un terzo elemento \(x\top y\) (come può essere ad esempio prendere due simmetrie del triangolo equilatero ed applicarle in una specifica successione), è detto gruppo se soddisfa le seguenti proprietà:
(proprietà associativa) per ogni \(x,y,z\in G\), abbiamo \(x\top (y\top z)=(x\top y)\top z\) Nota: usualmente il simbolo \(\top\) dell’operazione viene omesso e si scrive semplicemente \(x(yz)=(xy)z\). Inoltre \(xy\) viene detto il prodotto di \(x\) e \(y\).
(esistenza dell’elemento neutro) esiste un elemento \(e\in G\) tale che \(e\top x=x\top e=x\) per ogni \(x\in G\)
(esistenza degli inversi) per ogni elemento \(x\in G\), esiste un elemento \(u\in G\) tale che \(x\top u=u\top x=e\)
La strada per arrivare a questa definizione così sintetica e chiara di gruppo è stata lunga e tortuosa, ed ha visto tentativi fatti da illustri matematici, quali Cauchy (nel 1845), Cayley (nel 1854 e nel 1878), Kronecker (nel 1870), von Dyck (nel 1882), Frobenius (nel 1887), Weber (nel 1895) e Burnside (nel 1897).
Perché questa definizione astratta?
In matematica, più che in ogni altra scienza, è necessario sapere esattamente quali sono gli oggetti di cui ci si sta occupando e quali sono le proprietà di cui godono (onde evitare paradossi e/o contraddizioni). Ora, le simmetrie possono presentarsi in forme ben diverse rispetto alle succitate isometrie. Se ad esempio si pensa all’equazione in due variabili \(xy+1=0\), appare evidente che questa sia simmetrica rispetto allo scambiare le variabili \(x\) e \(y\). Senza contare che anche le figure geometriche possono essere veramente particolari e che magari per questo motivo conviene restringere talvolta la tipologia di simmetria che si sta andando a considerare. Ad esempio, nel seguente ‘‘albero’’ ci si può chiedere quali siano le simmetrie che fissino i vertici.
Se vogliamo allora una teoria sufficientemente potente da poter descrivere tutte le tipologie di simmetrie dobbiamo necessariamente barattare un po’ di senso fisico per della potenza astrattiva matematica. Ad esempio, la definizione precedente è sufficientemente potente da permettere di descrivere molti degli insiemi numerici che conosciamo con le relative operazioni elementari. Pensiamo ad esempio all’insieme dei numeri reali \(\mathbb R\) con la somma usuale. Chiaramente, presi tre numeri reali \(r,s,t\), abbiamo:
\((r+s)+t=r+(s+t)\)
\(0+r=r=r+0\)
per ogni \(r\), esiste l’inverso (anche detto opposto in questo caso), e cioè \(-r\).
Difatti \(r+(-r)=0=(-r)+r\)
Si potrebbe allora pensare di apporre la seguente critica: il nostro modello matematico atto a descrivere il concetto di simmetria (cioè i gruppi) va anche a descrivere cose che apparentemente simmetrie non sono?
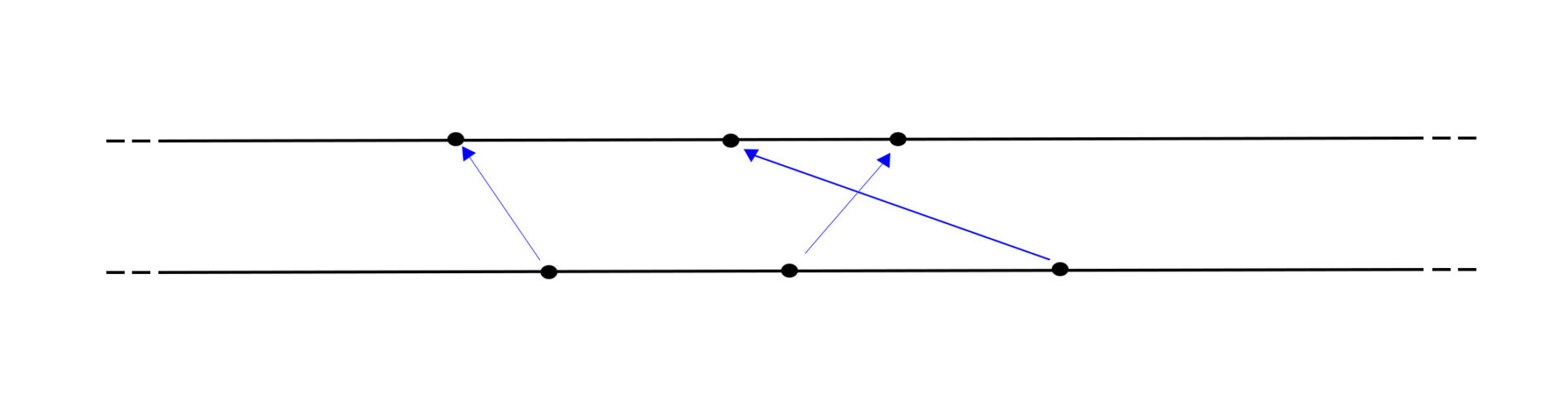
Beh, a guardar bene, in realtà, l’insieme dei numeri reali con l’addizione può essere considerato come un insieme di simmetrie. Pensiamo infatti alla retta reale come viene usualmente vista. Allora, il numero \(2\) può essere considerato come la traslazione di lunghezza due della retta: cioè la retta reale trasla di due unità a destra.
Viceversa, se partiamo dal considerare queste tipologie di simmetrie traslazionali (senza curarci di pensare a concetti come somma e insieme dei numeri reali), otteniamo un gruppo (di simmetrie della retta) che risulta essere estremamente simile al gruppo dei numeri reali con l’addizione. Tanto simili (in gergo, isomorfi) che è sufficiente studiarne uno solo per conoscere tutte le proprietà di entrambi. Quello che si fa infatti in teoria dei gruppi è lavorare con determinati ‘‘rappresentanti’’ di insiemi di gruppi simili.
Che succede invece per l’insieme dei numeri reali con la moltiplicazione? Tanto per cominciare, non è un gruppo perché non rispetta il terzo assioma: l’elemento \(0\) non ha un inverso moltiplicativo. Dal punto di vista delle simmetrie della retta lo si capisce subito. Moltiplicare per zero non restituisce una simmetria della retta ma la comprime su di un unico punto: lo zero stesso. Affinché diventi un gruppo è però necessario e sufficiente rimuovere lo zero.
E la differenza? È facile osservare che la differenza non rispetta il primo assioma di gruppo. Ad esempio, \((1-2)-3\neq 1-(2-3)\). Nel contesto dell’algebra astratta e delle simmetrie, la differenza deve necessariamente essere vista come ‘‘somma con l’opposto’’. Tutte le volte che si scrive \(a-b\) si intende così \(a+(-b)\), dove \(-b\) rappresenta l’opposto. Discorso simile per la divisione.
Il teorema di Cayley
Ora, le simmetrie ricavate dalla somma e dalla moltiplicazione non sono altro che alcune particolari simmetrie della retta reale. Infatti, immaginiamo la retta reale come composta da singoli punti. Posso allora potenzialmente (AC!, e no, non mi riferisco all’aria condizionata) prendere quei punti e rimestarli a mio piacimento, in sostanza andando a creare quella che è detta essere una permutazione della retta (cioè una funzione biettiva della retta in sé). Anche se completamente casuali, queste possono essere considerate simmetrie della retta, dopotutto sto semplicemente muovendo i punti in maniera tale da rendere invariata la figura finale.
Ed in effetti, prima della definizione formale, è così che i gruppi venivano percepiti, come gruppi di permutazioni (o di sostituzioni) di insiemi di oggetti (ad esempio punti di una retta), e quindi di conseguenza implicitamente come insiemi di simmetrie. Il teorema di Cayley unifica i concetti di gruppo astratto e gruppo di permutazioni affermando che ogni gruppo astratto è in realtà un gruppo di permutazioni (il viceversa è ovvio). L’argomento dimostrativo è sostanzialmente quello che abbiamo espresso nella sezione precedente riguardo le traslazioni di una retta.
Arthur Cayley (1821 – 1895)
Dunque, effettivamente gruppi astratti e gruppi di permutazioni/simmetrie/sostituzioni rappresentano lo stesso concetto. Osserviamo esplicitamente qui che Cayley fu realmente il primo a tentare di dare una definizione astratta di gruppo, ed è proprio in questo contesto che ha fornito una prova (sebbene parziale) di quello che oggi è noto come teorema di Cayley.
Per meglio comprendere come fossero concepiti i gruppi agli arbori, vale la pena dedicare il tempo rimanente di questa puntata sulla definizione di gruppo astratto tentata da Cayley. La sua definizione era data in termini del simbolo \(\theta\) che operava su un sistema di variabili \((x,y,\ldots)\) in maniera tale che \(\theta(x,y,\ldots)=(x’,y’,\ldots)\), dove \(x’,y’,\ldots\) sono funzioni in termini di \(x,y,\ldots\). Cayley si spinse al punto di definire anche il simbolo \(1\) per l’identità, cioè l’operatore che lascia le variabili inalterate. Definisce \(\theta\varphi\) come l’operatore risultante dall’operare sul sistema prima con \(\varphi\) e poi con \(\theta\). Nota, come abbiamo fatto anche noi, che non sempre \(\varphi\psi=\psi\varphi\) e postula l’associatività: \(\theta.\varphi\psi=\theta\varphi.\psi\).
Il lettore attento non si sarà però lasciato sfuggire che qualcosa non quadra in questa definizione. Perché ad esempio postulare la legge associativa se gli elementi del gruppo sono funzioni/operatori, e per tali enti l’associatività della composizione è sempre verificata? Inoltre non era neanche chiaro se le funzioni \(x’,y’,\ldots\) dovessero fare parte del sistema iniziale o no. Ad ogni modo, come abbiamo visto Cayley non era lontano dalla risposta finale, e questo tentativo ispirerà tanti altri a lavorare all’argomento, fornendoci i tre fecondi assiomi visti sopra.
Conclusioni
Trovo incredibilmente affascinante il fatto che si possa unificare il mondo delle simmetrie con tre soli e facili assiomi, è qualcosa che va in contrasto con le tante complicanze della vita di tutti i giorni. E con solo questi pochi assiomi, la teoria dei gruppi riesce anche a fornire le fondamenta per la formalizzazione di buona parte dell’algebra moderna: anelli, campi, moduli, spazi vettoriali, ognuno di questi concetti sottintende un gruppo, ed in ciascuno di questi, i gruppi giocano spesso un ruolo chiave. Tre semplici assiomi, che però possono dar vita a gruppi di complessità eccezionali.
Qui finisce questo secondo episodio. Nel prossimo vedremo come la teoria dei gruppi (così come le simmetrie) sia tutta intorno a noi, e come possa aiutarci nella risoluzione di alcuni problemi di natura fisica e ludica.
Marco Trombetti
Professore Associato di Algebra presso il Dipartimento di Matematica e Applicazioni “Renato Caccioppoli” dell’Università degli Studi di Napoli Federico II. È vicepresidente dell’associazione no-profit “AGTA – Advances in Group Theory and Applications” ed Editor-in-Chief della rivista “Advances in Group Theory and Applications”. Il 30 gennaio 2020, ha ricevuto (ex aequo con E. Giannelli) il Premio Nazionale “Mario Curzio” per il miglior giovane ricercatore in algebra (non professore), assegnato dall’Accademia Pontaniana.
Altre cose di MaddMaths! che potresti leggere
S come Simmetria Cos'è la Simmetria? Beh, diciamo che questa frase potrebbe essere…
This website uses cookies to improve your experience. We'll assume you're ok with this, but you can opt-out if you wish.AcceptRead More
Privacy & Cookies Policy
Privacy Overview
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. This category only includes cookies that ensures basic functionalities and security features of the website. These cookies do not store any personal information.
Any cookies that may not be particularly necessary for the website to function and is used specifically to collect user personal data via analytics, ads, other embedded contents are termed as non-necessary cookies. It is mandatory to procure user consent prior to running these cookies on your website.









 - Episodio 3 - Essi vivono")
 – Episodio 4 – Un diavolo per Capelli: i teoremi di Sylow")




 to Watch: MathsWithKala")
")
